Embodied Spatial Intelligence Building Real-Time 3D Navigation for Industrial Environments

This is a very straightforward idea to convey, but extremely difficult to create a system that can successfully do all of these things; i.e.; perceive an unknown environment, create a precise map of that environment at the time of exploration, and make safe decisions about their actions while they are still exploring a dynamically changing environment.
Why This Matters Now
Most industrial spaces do not remain the same. For example, warehouses can change location and construction zones can change their configuration; manufacturing areas can include very active equipment, temporary blocking/obstruction, and workers in locations that have no set pattern or established routing. Because of this, traditional navigation systems that rely upon pre-created maps or controlled resources typically fail after being subjected to real world as it becomes chaotic.
As such, this is where real-time 3D mapping becomes important to both the businesses using it as a research tool because companies will utilize robots and autonomous systems to enter spaces not on a map (or global positioning) as they continue to learn and continue working in a partially unknown environment. In many cases, real-time 3D mapping allows companies to reduce stoppages, decrease the amount of time/effort involved in correcting and directing activities of workers/vehicle and provide a more seamless path from non-automated to an automated workplace.
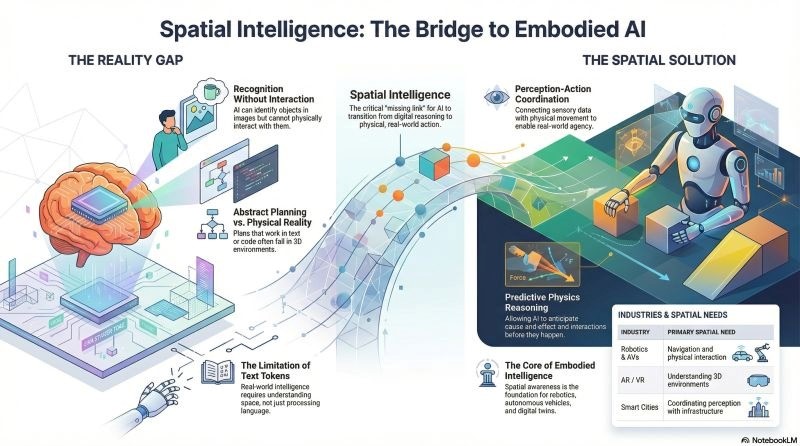
What Embodied Spatial Intelligence Actually Does
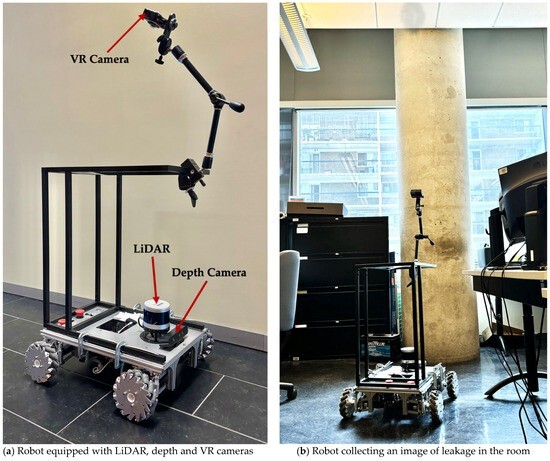
At a high level, the above system integrates perception, memory, and action sensor data (from a camera with depth) via computer vision systems to determine the geometric characteristics of the environment around the robot while navigation systems produce a representation of the robot's current location and its next possible paths. Recent work has explored using implicit scene representations as part of generating the representative image of the world or using an online model for learning to navigate or explore by turning when it makes a determination of being able to move.
The primary change in technology is no longer passively using the visual input derived from the camera (producing a map to later use for planning) but through actively understanding the visual world around them. In traditional pipelines, vision produced a map and subsequently, the machine would use the map for plan execution. In embodied robots, while planning for next exploration move (e.g., to avoid an obstacle, reach a target path) machines continue to re-evaluate the environment (spatial memory) as they move through it. The smaller loop of spatial memory generation and navigation makes the machine feel much more like what we use to operate in the real world than today’s laboratory demonstration of robots.
Why Industrial Navigation Is the Right Test
The industrial sector can make it difficult to prove your worth, but that's what makes it an ideal application area. A warehouse aisle might be blocked in the morning only to have it cleared out by noon, the shape of a construction site can change from hour to hour, and mining corridors, factory floors, and logistics hubs can all have high levels of congestion, noise, and visual inconsistency.
The degree of uncertainty present creates a far more complicated issue for navigating within the industrial sector than for robotics designed for controlled indoor areas. If a system can navigate in an unmapped warehouse or an ever-evolving plant floor, it is doing much more than just identifying objects; it is creating sufficient context to operate safely within an environment that will not stop moving.
The Business Case Is Bigger Than Robots
While presenting autonomy as part of the overall value chain is an important component of commercial value, there is much more to be gained by leveraging the data generated from real-time mapping in order to achieve enhanced efficiency in those areas, such as: taking away manually from surveying sites; improving safety compliance and streamlining fleet operations; and making it possible for companies to have accurate information to plan operations prior to deploying personnel and machines into those same areas.
As a result, current investments made by organizations in the industrial AI space are being evaluated based on how much “friction” they will remove from their daily operations; not on how “novel” they are. For example, an industrial AI system that can assist a warehouse-based robot around a temporary object blockage or be able to assist a construction-based robot in adapting to changing geometry saves time literally. And, the cumulative effect of this time saving will produce particularly significant savings where pressures around labor shortages or high costs of disruptions exist.
The Technical Challenge Under the Hood
While accurately perceiving and understanding the world through vision may seem like a challenge in and of itself, there are other significant difficulties as well. One of those difficulties is creating and maintaining spatial models that are useful as the surrounding environment changes. The latest research in this area is starting to show some promise with the developing of implicit neural scene representations, self-supervised camera calibrations, and 3D spatial reasoning techniques that can be scaled up or down from small to large spaces.
Also, an area that has become very popular in recent years is the use of frontier-based exploration techniques—where unmapped areas are treated as part of the decision making process rather than being considered "blind spots"—is also of great importance. This distinction may seem to be an inconsequential difference from a technical standpoint, but it is a major shift in the mindsets of current systems. Instead of waiting for a complete mapping solution, users will be able to develop a system that will smartly explore unknown terrain and continue to execute a mission.
What to Watch Next
While accurately perceiving and understanding the world through vision may seem like a challenge in and of itself, there are other significant difficulties as well. One of those difficulties is creating and maintaining spatial models that are useful as the surrounding environment changes. The latest research in this area is starting to show some promise with the developing of implicit neural scene representations, self-supervised camera calibrations, and 3D spatial reasoning techniques that can be scaled up or down from small to large spaces.
Also, an area that has become very popular in recent years is the use of frontier-based exploration techniques—where unmapped areas are treated as part of the decision making process rather than being considered "blind spots"—is also of great importance. This distinction may seem to be an inconsequential difference from a technical standpoint, but it is a major shift in the mindsets of current systems. Instead of waiting for a complete mapping solution, users will be able to develop a system that will smartly explore unknown terrain and continue to execute a mission.
The key point is that Spatial Intelligence is becoming more prevalent in operation rather than just theory. In industrial environments, the added cost of a delay or detour, as well as safety concerns, will help to shape the future method of development and deployment of autonomous systems.
Latest Posts
