Sim-to-Real Transfer How Photorealistic Physics Engines Train Physical AI

The way to make artificial intelligence training less difficult for both companies and researchers, is the application of the so-called physics engines. To put it differently, physics engine is a highly complex computer simulation system capable of creating a virtually real environment. That is, sim-to-real transfer is a process of transferring the skills and experiences of artificial intelligence in the virtual world into the real world.
What Is Sim-to-Real Transfer?
Sim-to-real transfer is a technique where the AI model is trained in a simulation environment before implementing it in the real world. Engineers prefer to train their robots in the environment before the actual real-world situation in order to save on costly errors.
An AI system can conduct training through millions of testing procedures in a shorter time in simulation compared to reality. It can learn how to walk, pick objects, move around obstacles or even drive vehicles without being damaged or under supervision by a person. The AI model is later moved to a machine after performing well in the simulation.
Why Traditional Robot Training Is Difficult
Training robots in the world has various drawbacks. They are costly and require a lot of effort in order to maintain their working properly.
For instance, if it is needed to teach robots which resemble human beings how to walk, it may have to fall one thousand times in order to become able to walk steadily. Training in such a manner is too costly and inefficient if done in the world. Such as natural disasters, machine failures, accidents, workplace incidents and abnormal weather conditions occur rarely, but it is necessary to inform computers about them in order to prepare the machine for this kind of situations.
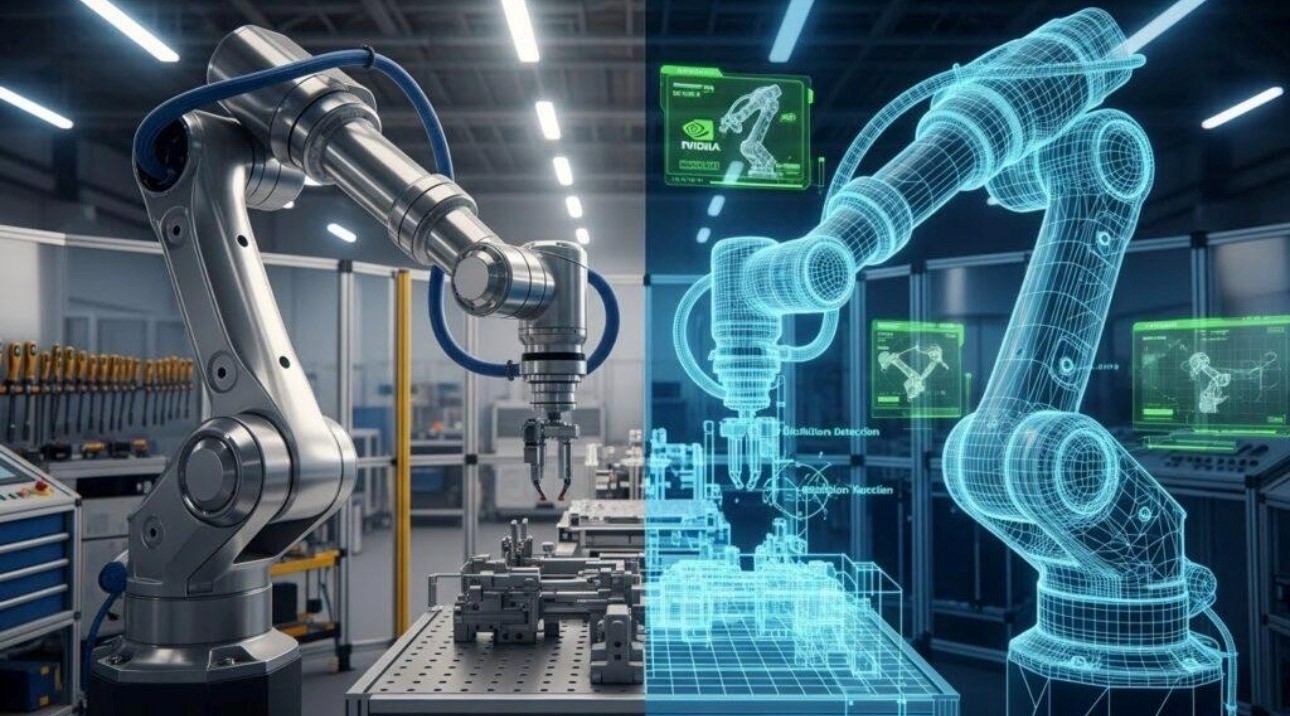
The Rise of Photorealistic Physics Engines
Simulations in early days were not so efficient. Not much resembled the real world. But physics engines of today have come a long way since then.
Today’s computers have reached such standards that allow for real life representation of such things as lighting conditions, composition of matter, motion dynamics, weather conditions and haptics. All that is used for creation of life-like environments for training of artificial intelligence systems. Physics engines create life-like movement and interactions in the environment.
Why Realism Matters
Another difficulty that arises when transferring some knowledge from a simulation to reality is called the reality gap. The reality gap is defined as the discrepancy that exists between the events happening in the environment and the actual reality.
Creating an overly simplified simulation will cause artificial intelligence to learn certain skills that are efficient within the simulation but fail in the real-world setting. Very realistic simulations can be used in order to reduce the reality gap because they provide the artificial intelligence with information about the way the real world looks, its textures, variations, and uncertainties.
Training Physical AI at Scale

One of the advantages of simulation is that it can do many things at once. A physical robot can only be in one place at a time. A virtual robot can be duplicated many times in the simulation.
Robots can be trained simultaneously. As a result, it accelerates their learning. The robot will gain several years of experience in several days or weeks. Nowadays, many robot manufacturers employ simulated training sessions. It allows saving money and reducing development time of robots.
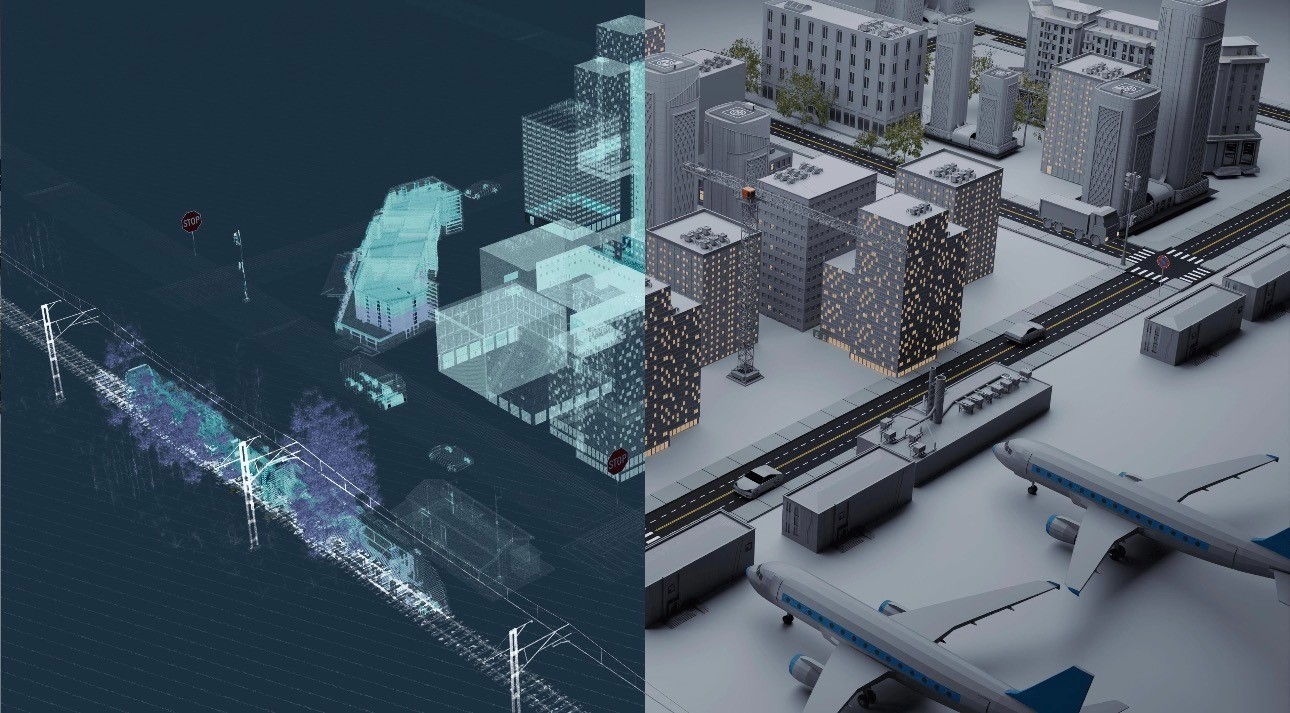
Applications in Autonomous Vehicles
The car industry is really enthusiastic about sim-to-real technology. There are so many factors an autonomous vehicle needs to consider, such as pedestrians, cyclists, weather, traffic lights and unpredictable behavior of people.
Getting data from real life situations is impossible because of so many variables. In a simulation, developers can create dangerous and unpredictable conditions in a secure manner. Such simulations can be created by adding elements of terrible weather like strong rain or snow, road closures, mechanical breakdowns of cars and other things.
Humanoid Robots and Embodied AI
Simulation-to-reality transfer also plays an essential role in humanoid robotics, as companies producing general-purpose robots are increasingly resorting to simulation technologies to train their robots how to walk, manipulate objects, and interact with the environment.
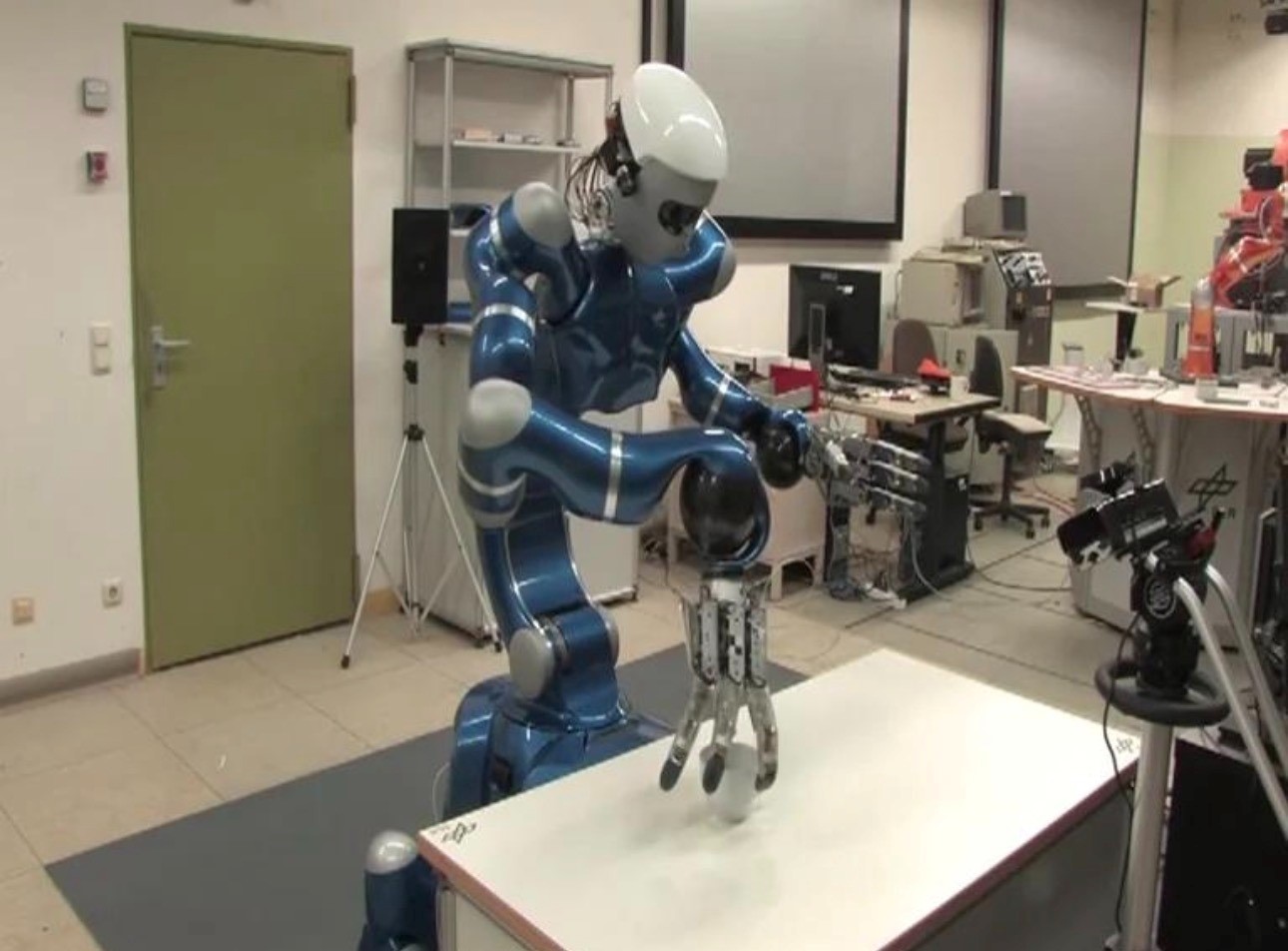
However, it takes a robot less time to acquire these skills in a simulated environment than in the real world. In such a manner, it is possible to avoid the need to repair any physical damage that may occur in the course of training. Many developments have taken place in the field of embodied artificial intelligence – learning through interaction with the physical world.
The Role of Synthetic Data
Photorealistic simulations generate large amounts of data. Such synthetic data can be used in training computer vision systems, object recognition algorithms and navigation.
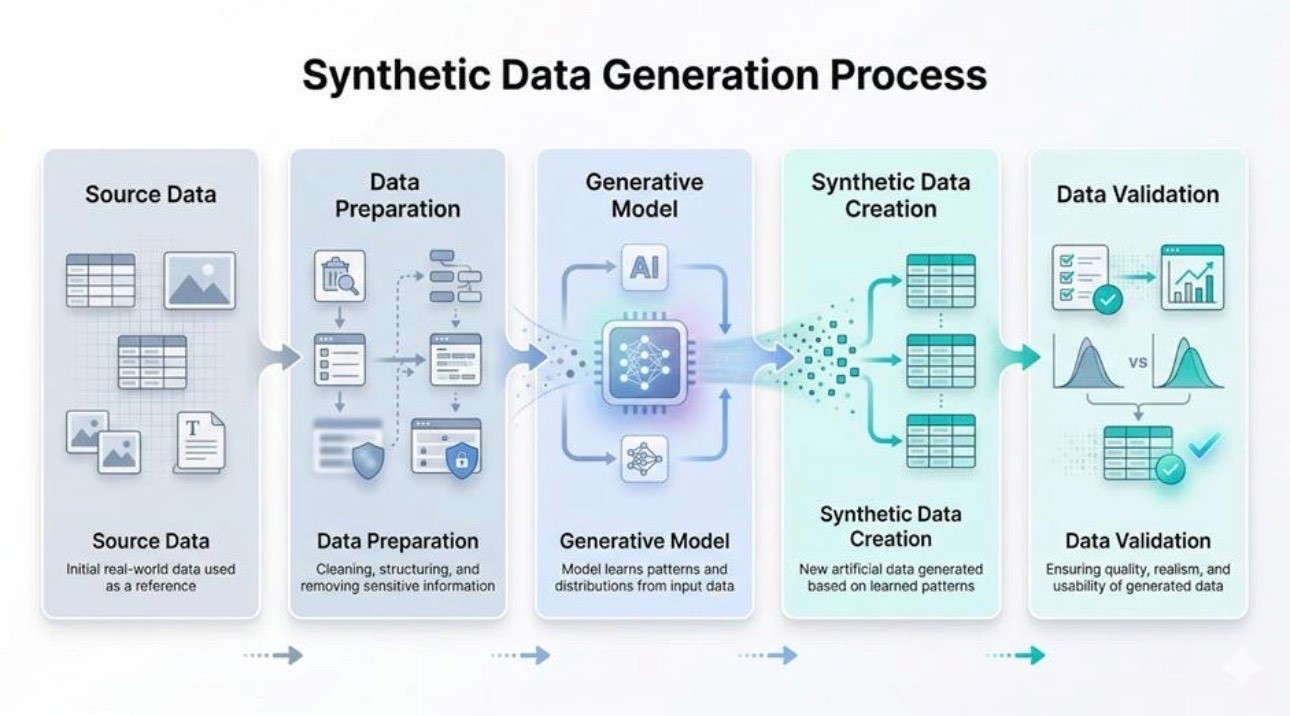
Real data collection is costly. The process involves a long period of collection, labeling and processing. In contrast, artificial data generation is quick and efficient. Synthetic data is crucial since it allows an artificial intelligence system to learn rare phenomena.
Challenges That Remain
However, it is worth mentioning that even after all this progress was made in the field, there are still issues concerning the quality of sim-to-real transfer. The realistic simulation cannot cover all aspects of the real-life processes.
It means that small nuances such as friction, properties of materials, sensor noise, and environmental factors play a certain role. There are various methods that address this issue, among which domain randomization, adaptive learning, and world fine-tuning.
The Future of Physical AI
In conclusion, the development of the future of robotics and physics AI depends on the advancement of simulation technology. Physics engines that resemble real systems are able to enhance the speed and efficiency of learning processes.
There is an influx of funding for development of twins, virtual plants, and simulation platforms capable of training multiple machines concurrently. It will bring about the innovations in transportation, healthcare, manufacturing, logistics, and humanoid robots. Learning methods will change due to sim-to-reality transfer. The learning will shift from reality to simulation environments in order for future AI systems to spend most of their time training before applying their knowledge in the physical environment.
Latest Posts
